 Ask an Engineer
Ask an EngineerExtend your reach
By Andrew Zaske on July 6, 2021
 Linear actuators are the long arm for collaborative robots and autonomous guided vehicles
Linear actuators are the long arm for collaborative robots and autonomous guided vehicles
Collaborative robots have been around for only a few years, but they have become a major sector of the robotics industry because, well, they’re handy. And they work well with others. Collaborative robots were designed to work in the same space with humans, in areas such as material handling, paper manufacturing, packaging, and medical device manufacturing. A cobot doesn’t care where it works or when it works. It will happily take on repetitive tasks, freeing up time for human workers to do more problem-solving tasks. They are safe around their human co-workers, but sometimes a cobot has to be isolated from human contact (for example, in medical applications), and they work equally well on their own.
Autonomous guided vehicles (AGVs) have similar advantages: They perform repetitive tasks very well; they can work side-by-side with human workers; and, they can also go where no man or woman can go, or wants to go. And, AGVs always show up for work; they don’t get sick or take vacations.
Both of these technologies are good on their own merits, but linear actuators can actually help improve their performance. Here are ways actuators keep things moving, whether robotically or autonomously.
Automated palletizing: Actuator gives a precise and sturdy lift to robotic arm
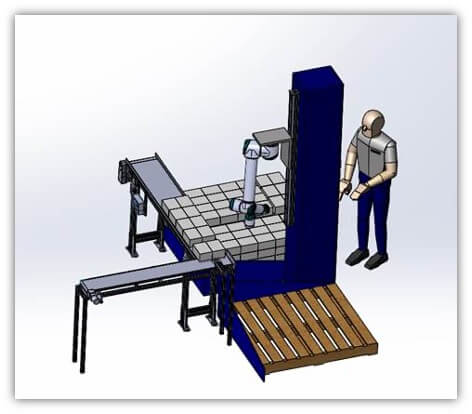 Sometimes even a robot needs an extra hand. Cobots (and more serious non-collaborative robots) that accurately and quickly stack, sort and divert are ideal for pick and place. An automated palletizing machine uses a robotic arm to stack boxes on a pallet. Sounds simple enough; but when the reach is too long or the weight is high, it’s time to either buy a much larger robot (very expensive) or bring in the heavy-lifting actuators.
Sometimes even a robot needs an extra hand. Cobots (and more serious non-collaborative robots) that accurately and quickly stack, sort and divert are ideal for pick and place. An automated palletizing machine uses a robotic arm to stack boxes on a pallet. Sounds simple enough; but when the reach is too long or the weight is high, it’s time to either buy a much larger robot (very expensive) or bring in the heavy-lifting actuators.
The size of an actuator to carry a collaborative robot depends on two key factors: the weight of the object being lifted; and the length of the reach (measured from the base of the actuator). The greater the weight and the longer the reach (this is referred to as a ‘moment load’), the more robust the actuator has to be. The weight of the robot is also a factor to be figured in. Mounted to the actuator, the cobot performs three separate movements: selects the object; picks it up high enough to clear a conveyor; and sets it down on a pallet. Warehouse production rates are usually fast, so the vertical movement needs to be completed quickly and accurately.
The B3 series of linear actuators has the mechanical rigidity and moment-loading capability to support the robotic arm when it is fully extended and carrying the load. The actuator must support the high bending moment and prevent the load from falling. Adding a brake to the system ensures that even with a loss of power the robot and its load would not fall.
The actuator is equipped with a 180-degree wrap-around carriage that is driven through our patented ‘V-Wedge’ bearing system and also guided through raceways in the sides of the extrusion. It’s rigidly connected to the actuator, and it is specifically designed to enhance moment-loading capability in the direction of motion.
Actuators for this type of application are capable of carrying loads up to 8032 lbf (35.7 kN), strokes up to 179 inches (4,547mm) depending on screw selections, and speeds up to 60 inches per second (1,524 mm/sec). This application uses a catalog product, with no special mount or other features added, which reduces time to specify, manufacture and install.
Back and forth: Horizontal robot extender
 The same can be done in a horizontal configuration using a different type of actuator. Instead of increasing the size and capability (and cost) of the robot to have a longer arm, put an actuator with a very stable platform under it. You can move simply and smoothly back and forth, and keep the length of the robot arm to a minimum which saves money and increases precision. The collaborative robot moves horizontally from one conveying side to the other. A TRS twin profile rail stage actuator provides the extended reach with the required forces, load-carrying capabilities (up to 6.0 kN (1,349 lbf)), and speed. The actuator is completely enclosed to prevent ingress from particulate matter in the manufacturing area, helping to ensure smooth and consistent motion for years.
The same can be done in a horizontal configuration using a different type of actuator. Instead of increasing the size and capability (and cost) of the robot to have a longer arm, put an actuator with a very stable platform under it. You can move simply and smoothly back and forth, and keep the length of the robot arm to a minimum which saves money and increases precision. The collaborative robot moves horizontally from one conveying side to the other. A TRS twin profile rail stage actuator provides the extended reach with the required forces, load-carrying capabilities (up to 6.0 kN (1,349 lbf)), and speed. The actuator is completely enclosed to prevent ingress from particulate matter in the manufacturing area, helping to ensure smooth and consistent motion for years.
Remote controlled…shipping container?
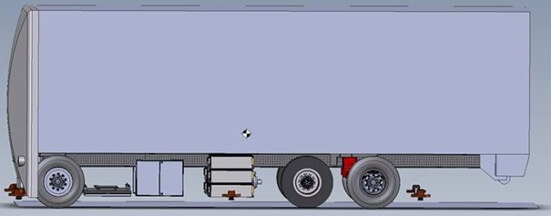 When your ship comes in, how long do you have to wait for it to unload? Container ships can wait weeks to get in to port to offload freight. This of course affects the supply chain and deliveries, which many of us have noticed these past 18 months. The cause can be due to overseas manufacturing ramping up as well as a shortage of dock workers. When there aren’t enough dock workers, one solution to moving 40-foot shipping containers is similar in concept to remote-controlled toy trucks. For the shipping container transport vehicle, a large actuator provides the steering mechanism. Mounted underneath the shipping container (located to the right of the far-left wheel in diagram), the RSA heavy duty actuator moves the wheels back and forth to provide precise steering. This electric actuator can run off battery power and is completely reliable. It replaces a hydraulic system that would require a power unit, circulating high pressure fluid, hoses, etc. The operator now simply steers the container along the desired path with a hand-held control pad and can also pre-program routes and add crash-avoidance technology. Ship container movement made simple and reliable with electric actuation.
When your ship comes in, how long do you have to wait for it to unload? Container ships can wait weeks to get in to port to offload freight. This of course affects the supply chain and deliveries, which many of us have noticed these past 18 months. The cause can be due to overseas manufacturing ramping up as well as a shortage of dock workers. When there aren’t enough dock workers, one solution to moving 40-foot shipping containers is similar in concept to remote-controlled toy trucks. For the shipping container transport vehicle, a large actuator provides the steering mechanism. Mounted underneath the shipping container (located to the right of the far-left wheel in diagram), the RSA heavy duty actuator moves the wheels back and forth to provide precise steering. This electric actuator can run off battery power and is completely reliable. It replaces a hydraulic system that would require a power unit, circulating high pressure fluid, hoses, etc. The operator now simply steers the container along the desired path with a hand-held control pad and can also pre-program routes and add crash-avoidance technology. Ship container movement made simple and reliable with electric actuation.
Get a grip! End of arm tooling with dual scissors actuator
 End-of-arm tooling often includes grippers or suction cups. These are common devices for making the connection between robot and object to be moved. Here’s another way: A dual carriage design based on rodless belt actuators (B3 or MX). Both carriages are rigidly fixed—to the belt or to the screw. However, they move in opposite directions. They start together, move at the same rate away from each other, and then move at the same rate back together. A big benefit of this design is the fact that it is driven by a single servo motor which reduced cost and weight to this actuator solution. There are many different applications for this design: clamping onto packages for movement; open and close doors or bags; center a package for conveying so it gets to the same spot every time. A screw-driven arrangement allows for higher force capability, while a belt-driven actuator moves quickly to center or divert a product.
End-of-arm tooling often includes grippers or suction cups. These are common devices for making the connection between robot and object to be moved. Here’s another way: A dual carriage design based on rodless belt actuators (B3 or MX). Both carriages are rigidly fixed—to the belt or to the screw. However, they move in opposite directions. They start together, move at the same rate away from each other, and then move at the same rate back together. A big benefit of this design is the fact that it is driven by a single servo motor which reduced cost and weight to this actuator solution. There are many different applications for this design: clamping onto packages for movement; open and close doors or bags; center a package for conveying so it gets to the same spot every time. A screw-driven arrangement allows for higher force capability, while a belt-driven actuator moves quickly to center or divert a product.
Do you need help designing a collaborative robot or autonomous guided vehicle? Discuss your application with us and start the design process. Ask an engineer.